数控折弯机器人的自动化
钣金折弯机器人的自动化技术,核心目标是让机器替代人工,完成精准、重复的折弯工作。这项技术重点关注两个部分:一是执行动作的机械手本身的设计,二是指挥机械手如何运动的大脑——计算机控制系统。它属于工业机器人在制造业中的一个重要应用领域。
数控技术与机器人技术的融合
现代工业机器人的诞生,可以看作是数控技术和遥操作技术结合的结果。简单来说,数控技术贡献了“可编程”的思想,让机器能记住并执行一系列指令。而遥操作技术则提供了机械臂的雏形,实现了远程的动作模仿。第一个真正投入使用的工业机器人出现在1961年,它的工作是从压铸机中取出高温的零件。这个突破主要归功于发明家乔治·德沃尔和企业家约瑟夫·恩格尔伯格。德沃尔设计了可编程机械手的原理,恩格尔伯格则成功将其推广到工厂中,并创立了第一家机器人公司。
什么是工业机器人?
机器人的核心技术基础是数控和遥操作。数控(NC)指的是用数字代码(早期是打在纸带上的孔)来控制机床运动的技术。它在20世纪50年代初成熟,美国麻省理工学院在1952年展示了第一台数控机床。为了方便编程,人们后来又开发了像APT这样的专用计算机语言。
而折弯机器人所用的“手”,其灵感直接来源于遥操作器。这是一种由人远程控制的机械手。它的研发最初是为了让工作人员能在安全距离外操作危险的放射性材料。操作员在这边移动操控杆,另一端的机械手就完全复制他的动作。
如今,工业机器人有了更通用的定义。根据机器人工业协会的说法,一个工业机器人应该是可以重复编程的多功能机械手。它能通过改变程序来搬运物品、操作工具,完成多种不同的任务。
折弯机器人的核心:机械手
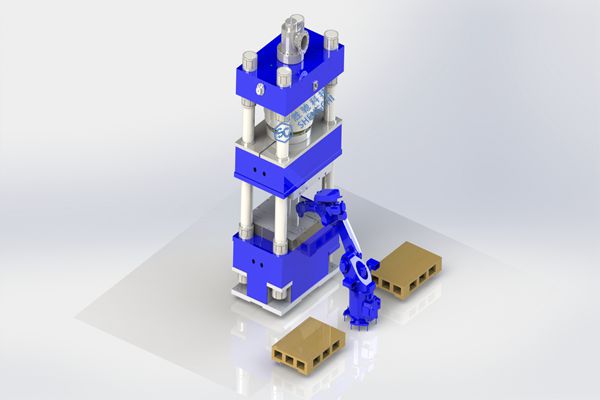
一台用于折弯的机器人,其机械手是由许多连杆和关节串联起来的。连杆是坚固的骨架,关节(也叫轴)则是可以活动的连接部分。机器人就是靠这些关节的转动或移动来完成复杂动作的。例如,像江苏胜驰自动化公司生产的全自动折弯机器人,通常采用六轴设计。这意味着它有六个可以独立运动的活动关节。一般来说,拥有六个或更多轴的数控折弯设备,才具备被称为“机器人折弯机”的灵活性和自动化能力。
自动化生产的实践者
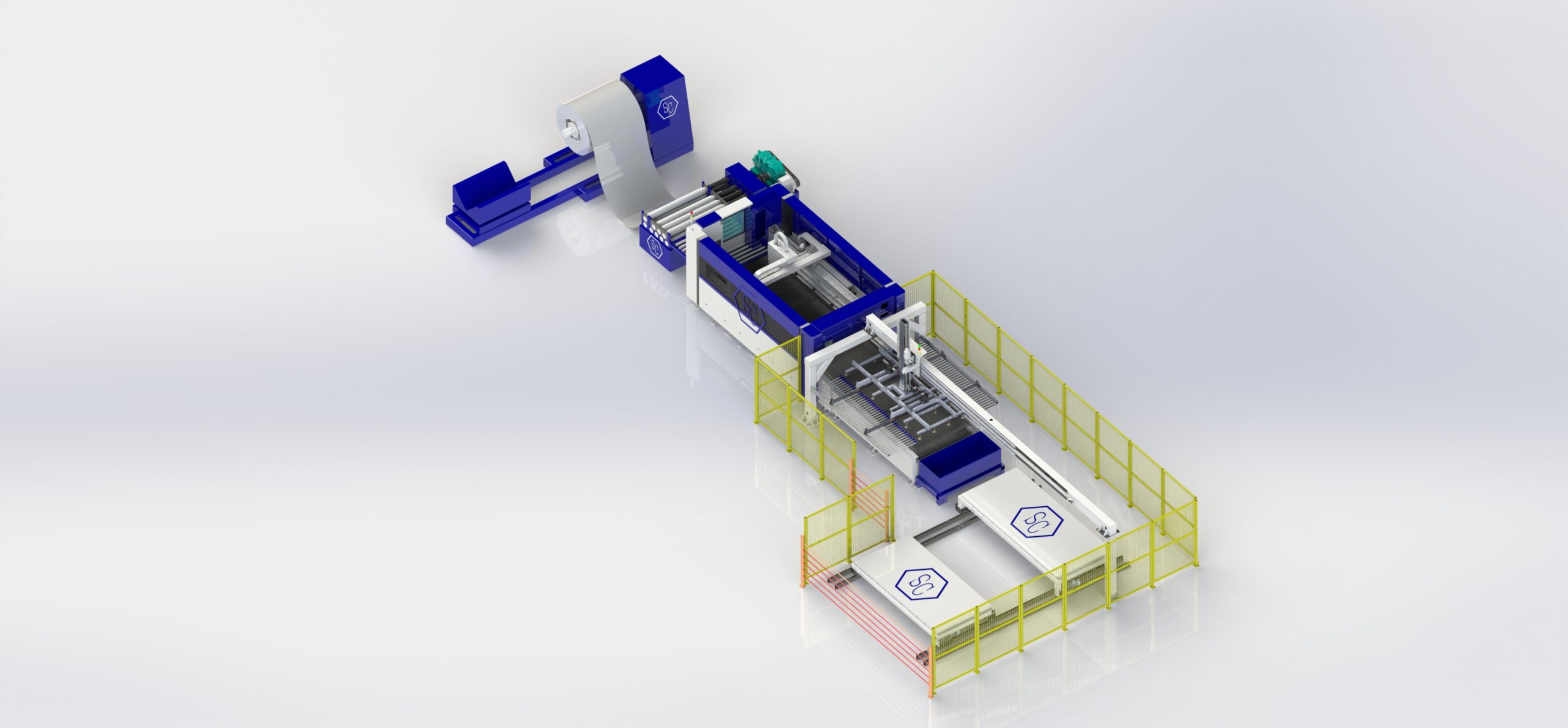
以江苏胜驰自动化公司为例,这家制造商专注于钣金加工领域的自动化。他们的业务包括设计定制数控机床、打造自动化生产线、对旧设备进行升级改造,以及提供配套的专用工具和夹具。他们能够为客户提供从机械结构、电气控制到液压和气动系统的整套解决方案,其核心目标就是建设全自动、无人化的智能工厂,大幅提高生产效率和一致性。