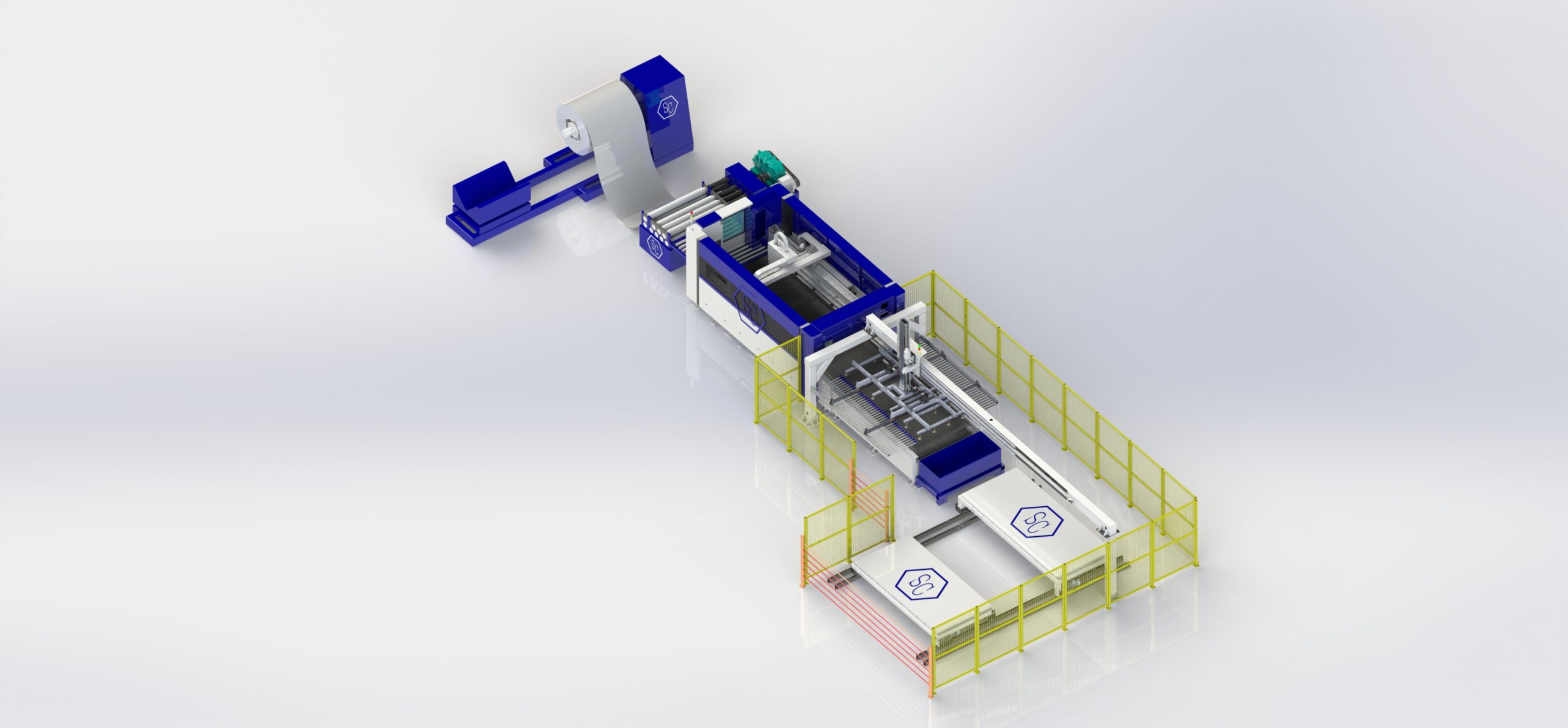
龙门桁架式机器人的运动速度主要受哪些因素影响?
龙门桁架式机器人的运动速度主要受以下核心因素影响,各因素间存在明显的耦合关系,共同决定设备的最终运行速率:
驱动系统性能
驱动电机的功率、转速特性以及配套减速箱的传动比,是决定运动速度的基础。高功率伺服电机可提供更强的动力输出,直接支撑更高的运动速度;而减速箱的传动比配置需兼顾速度与扭矩——大传动比虽能提升扭矩以承载更大载荷,但会降低末端运行速度,反之则可提升速度但扭矩受限。此外,滚珠丝杠、齿轮齿条、同步带轮等传动机构的精度与摩擦特性,也会影响速度稳定性,高精度、低摩擦的传动组件能减少能量损耗,保障高速运动的平顺性。
有效载荷重量
有效载荷与运动速度呈显著的负相关关系。当机器人承载的工件或工装重量增加时,为维持运动稳定性,驱动系统需输出更大扭矩,这会直接限制设备的最高运行速度;反之,轻载工况下,驱动系统无需过载运行,可充分释放速度性能。这一特性决定了龙门桁架式机器人“高速机型载荷小、大载荷机型速度低”的选型规律。
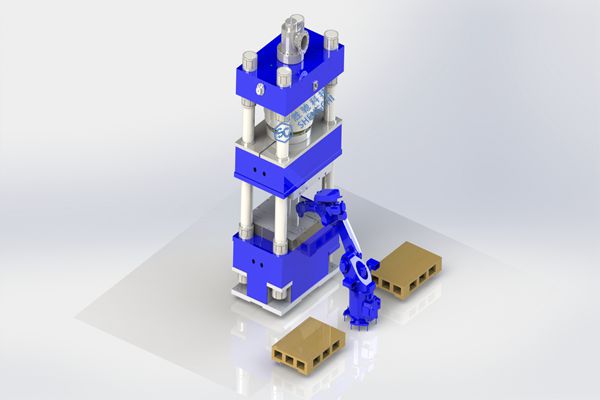
桁架结构设计参数
桁架的结构刚性、自重及跨度尺寸,对运动速度存在约束作用。大跨度的桁架结构易产生弹性形变,为避免高速运动时的振动与定位偏差,需降低运行速度以保障稳定性;而轻量化、高刚性的桁架设计(如采用高强度铝合金材料、优化桁架截面结构),可减少运动惯性,提升设备的加速、减速响应速度及最高运行速度。
运动控制策略
控制系统的算法优化程度直接影响速度表现。例如,加减速曲线的规划(如S型曲线加减速)可避免速度突变带来的冲击,使机器人在安全范围内达到更高的平稳运行速度;此外,路径规划算法的合理性也会影响速度——最优路径可减少无效运动,间接提升整体作业效率,而复杂路径下设备需频繁启停、变向,实际运行速度会大幅降低。
若您对生产线自动化改造的适配性存在疑问,或希望获取设备选型的专业建议,可随时联系我司技术顾问与销售团队,我们将为您提供定制化解决方案。